自分の手で世界に一つのドローンを作りたいなら必見です。ドローンとラジコンの違いは何か・・自作するためには何が必要なのか、基礎知識として必要な事と手続きについて。
ラジコンヘリとドローン・マルチコプターの違い
ドローンは、1対1の双方向通信
私(60代)が子どもの頃はラジコン・トランシーバと言えば高嶺の花、裕福な家庭の友達が持っているのを恨めしそうな顔で見つめているだけでしたが、ここ半世紀ほどで半導体の価格は低く抑えられ集積度も上がり中身もどんどん進化していき、多種多様で安価なラジコンが目移りするほどたくさん発売されており、ラジコンヘリや飛行機などを楽しむミドル世代が増加してきました。しかし、限られた周波数を共用するため時には混線してコントロール不能となったり別のコントローラー(プロポ)で、機体を乗っ取ることもできました。(27MHZ帯が主な使用周波数帯でした。)
送信機のアンテナにカラーリボンをつけて、どのチャンネルで操作しているか一目でわかるようにしていたなぁ。
混信トラブルを防ぐために、大勢が同時に飛ばすことがないように注意していました。 ノーコン状態で飛行機が墜落・・なんてこともありましたから。
もともとは、ラジコンはサーボモーターをリニア制御するためのアナログ信号を送っていたのですが、それもデジタル信号化され誤動作も少なくなりました。 ただ十分に楽しむための広い場所の確保が難しく、同好会やクラブに所属しないと思うように飛ばすことはできませんでした。
それでも、機体の大型化や精密化・制作の自由度(自作が趣味の人たち)の高さから根強い人気がありましたが、ここ10年ほどでそれらの状況は一変してしまいました。
ラジコンには興味はなくとも、ドローン・マルチコプターに興味を持つ人たちが急増してきたのです。理由は飛行機ほどの難易度は無く、ヘリよりも手軽で安全に遊べるのが最大のメリットでしょう。
ラジコンとドローンの最も異なる点は「フライトコントローラー」が搭載されているかどうかというこです。
フライトコントローラーは、各種センサーやアンテナが含まれます。(又は接続されます)
これらにより、ドローンは機体の自動姿勢制御や位置の特定が可能になります。フライトコントローラーが搭載されていないラジコンは、あくまで無線遠隔操作ができる機体であり、自律的な姿勢制御や位置の特定は行うことができません。
また、ドローンの場合は、各機体とコントローラーの通信接続を確立させる為のバインドと呼ばれる操作があります。コントロール信号は、バインド設定された機体との通信のみで隣で別の機体を使用しても誤動作することがありません。基本的に1対1の操作となります。(意図的に別のコントローラーでバインドさせることも可能で、コーチ(指導)モードなどで使われます。)
よく言われるマルチコプターとは、3つ以上の回転翼を搭載したヘリコプターのことで、その中でフライトコントローラーを有しているものはマルチコプターでありドローンでもあるのです。マルチコプターは、ドローンの1種です。
ポイントは「自律飛行が可能かどうか」です。
自律飛行とは、プログラミングによって自動的に飛行状態を制御できるということです。(必要な状況になると自動的に飛行操作が介入されます。)
現在使用する周波数帯も2.4GHz(無線免許不要)が主流で、5.7、5.8GHz帯はアマ無線や特殊無線の国家資格免許が必要です。
国内認証のとれている(技適マーク付)2.4GHzタイプのものは良いんですが、海外製のものは5GHz帯をしようしているものが多いので購入時にはよく確かめることが大切ですね。無資格での無線機器の運用は、罰則も結構厳しいんです。

5.8GHz帯のVTXを使いたい場合はアマ無線4級、5.6GHz帯(業務用)のVTXを使いたい場合は3級陸特(陸上特殊無線技士)の資格と開局申請が必要です。
このように制御方法の違いはあるにせよ、 ラジコンヘリもドローン・マルチコプターも「無人の航空機」であることに変わりはありませんので、2022年6月の改正航空法以降、昔から親しんできたラジコンも法律上の取り扱いが厳しくなってきました。
以下記事中では、マルチコプターという呼称を使用します。
現在では、国家資格まで必要になってきたのは正直かなり面倒だと思いますね。
ドローンにしろ、ラジコンにしろ個人が自由に作って自由に飛ばせる時代は終わってしまいました、ひたすら残念です。
ドローンの制御方法
ひと言で言ってしまえば現在のパソコンと同じで、基本的な構成パーツを購入して組み合わせれば誰にでもマルチコプターを制作することは可能なんです。
基本的な構成と制御方法を見てみましょう。
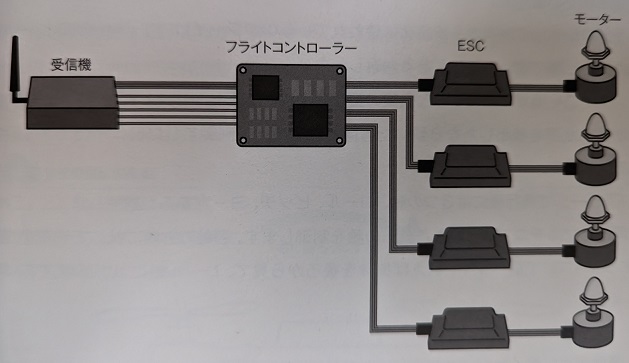
コントローラーの2本のスティックの上下・左右 の動きとして、4系統の制御(4個のモーター)は必要ですが、上記のように PWM方式とBUS方式の2通りに分けられます。
PWM方式は、受信機とフライトコントローラーの間をつなぐ線がモーターの数だけあり、パルス信号の幅の変化をESCに伝えます。 そのパルス幅に応じてバッテリーから電圧が供給されます。パルス信号のデューティー比が変わることでモーターの回転数が変わる訳です。
(上図PWM方式では、バッテリーのイラストを省略していますが、実際はBUS方式と同じ位置に接続して使用します。)
この場合、当然フライトコントローラーへの入力部もモーターの数だけ必要になってきます。
(ただし、PPM方式は1本で制御可能)
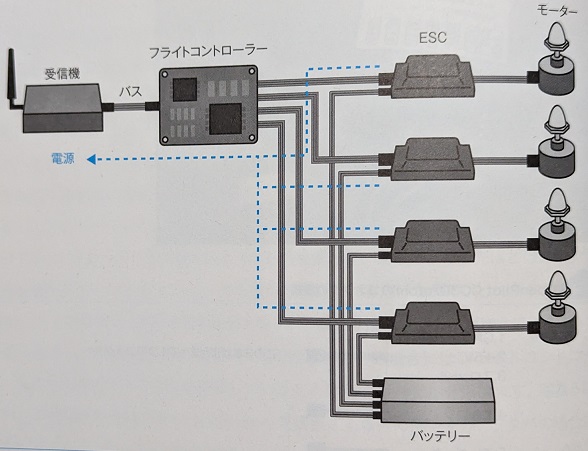
BUS方式は、受信機とフライトコントローラー間は、1本のBUS(データ信号)ラインで接続されており、どのESCに対しどのようなパルス信号を出すかはフライトコントローラーがやってくれます。
フライトコントローラー・受信機の電源は、ESCを通して供給されます。
高度なマルチコプターの場合、機体の細かな姿勢制御には機体の傾きやGPSによる位置情報をもとに複雑なプロペラの回転制御が行われています。
ブラシレスモーターが主流
マルチコプターの普及に一役買ったのが、強い磁力を持つネオジウム磁石や高性能バッテリーを使った強力なモーターでした。
当初は、ブラシ(回転端子部に電極を接触させる)付のモーターでしたが、現在では安価なトイドローンでさえブラシレスモーターを使用しています。
ブラシレスモーター とは、ブラシを持たないモータで、一般的には直流モータのうち、ブラシと整流子の機能を電子回路に置き換えたものを指します。
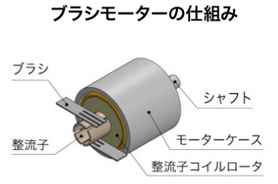
磁石はモーターケース側に取り付けられており、ブラシを通してローター(シャフト)のコイルに給電されるため、エネルギーロスやノイズ発生の原因となる。
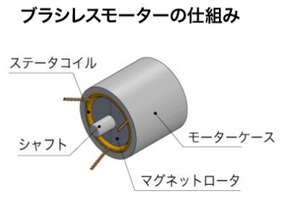
ローターシャフト側が磁石となっており、モーターケース側にあるステータコイルに給電される。
ブラシ(電極)をとおして内部のローター(コイル)を回転させるブラシモーターに対して、ブラシレスDCモータの場合は回転するのはマグネット(ローター)であり、コイルは外側のコア側に密着して固定され制御回路(フライトコントローラー)から電流が供給されます。つまり、無接点のため、非常にハイパワー、長寿命となる訳です。
マルチコプターに使うモーターはブラシレスモーターが最適と言えます。
プロペラの回転方向の違い
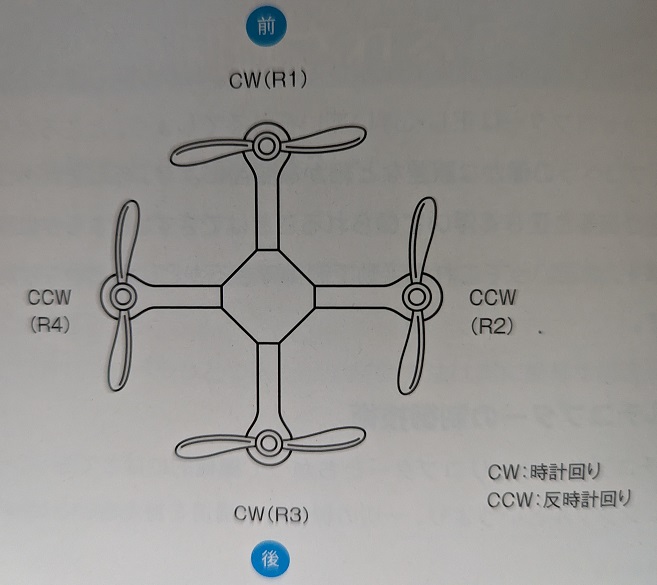
プロペラが回転すれば当然その反動で機体はその反対方向へと回転してしまいます。
ヘリコプターの場合は、機体後部に小型のローターがついています。
マルチコプターの場合は、それを打ち消し機体を安定させるためには、2対2でそれぞれ反対方向へプロペラを回転させる必要があります。
ヘリコプターにも反動を打ち消すため、二重反転ローターを装備しているものもありますね。
マルチコプターの機体を左右へ回転させたい場合は、対のモーターの回転数を変えてやればよいことになります。
前進の場合は、R1よりR3の回転数を上げ、後進の場合はその逆となります。
左横移動の場合は、R4よりR2の回転数を上げ、右横移動の場合はその逆となります。
それゆえ、プロペラのピッチ(ねじれ方向)は、R1・R3とR2・R4では逆向きとなっていますので取り付けには注意が必要です。
モーターはDC(直流)モーターですので、回転方向を変える場合は接続部の配線(極性)を入れ替えるだけです。
基本パーツはこれだけ
前述しましたように、基本的には各種のパーツを購入して組付けるだけですが、各種センサーや機能追加などをしたい場合(テレメトリーの使用)はそれなりに難易度は上がってきます。
完全自立型のマルチコプターを制作したい場合は、各種のセンサーを取り付けられるタイプのフライトコントローラーと手元のコントローラー(送信機)でのプログラムの変更・追加や設定などが必要となってきます。
その場合は、ご自身で整合性のあるパーツ同士を選ぶ事が大切です。
(マルチコプター対応の汎用型コントローラーが多く発売されていますので取説を見ながらコツコツと調整していけばそう難しくはありません。結構面倒ですが・・。)
(構成要素をひとつづつ見ていきます。)
1.コントローラー(送信機)
送信機は汎用性があるものを選びましょう。

タイプやサイズの異なる自作機を複数所有することを考えて、操作性の面でも慣れた送信機を使うのが安全です。
値段も1万円程度から30万円以上のものまであるので、予算に合わせてじっくりと選びます。場合によっては、直接メーカーにといあわせすることも念頭に置きましょう。
海外製のものもたくさんありますが、国内にちゃんとした代理店があること、サポートがしっかりしていること、国内技適を取得しているかどうかは大切なことです。ファームウエアの書き換えや問い合わせの便利さを考えて国産を選ぶのが無難でしょう。
送信機のチャンネル数:各スティックを前後左右に操作するため、最低でも4チャネルを使用します。そのほかモーターのロック解除や飛行モードの選択、ライトの点灯、ランディング・ギヤ、ジンバルなどスイッチなどの設定に応じてチャネルを使用します。8から10ch(チャンネル)あればたいていは事足りるでしょう。
フタバ / T10J プロポ 送信機 (10ch)モード2 / 左スロットル仕様 ヘリ用 +受信機 セットなどは、よく使われていますね。


OFDMと拡散スペクトラム方式について
大変混雑している2.4GHz帯を効率よく利用するため、通信信号を本来よりも広い帯域に拡散することで通信を安定させるスペクトラム拡散方式という通信方式が採用されています。
拡散スペクトラム方式は耐ノイズ性・秘匿性に優れた変調通信方式で、下記の通りメーカー毎に規格が違います。
残念ながらこれらの規格間には互換性がないため、送信機と受信機を選ぶ際にはどの通信規格に対応しているのかを確認する必要があります。同じメーカーでも複数の異なる通信規格の製品もあるので要注意です。
「OFDM」も同じ変調方式の一つ(二次変調)ですが、スペクトル拡散とは逆に、周波数帯域の狭い複数のチャンネル(サブキャリア)を使って、複数のデータを同時に送信する技術です。
チャンネル同士の周波数間隔を理論的に限界まで狭めることで、電波の周波数を有効利用しています。
( メーカー ) ( 通信方式 )
HITEC AFHSS
FUTABA FASST S-FHSS T-FHSS
SPECTRUM DSSS
JR DMSS
FRSKY ACCST
因みに、RadioMasterTX16S MKⅡ プロポ送信機 2.4GHz-16CHの場合は、Corona、Hitec、Futaba S-FHSS、Frskyのプロトコルに対応しています。
2.受信機
送信機からの操作信号は無線電波を介して受信機に伝えられ、更に受信機が受け取った信号はフライトコントローラーへと伝えらる訳ですが、受信機とフライトコントローラーの間での信号のやり取りについてみてみます。
受信機とフライトコントローラー間の通信規格について
前述で、大きく分けてアナログ方式(PWM)とデジタル方式(BUS)の説明をしましたが、1本のケーブルで8個までのモーターを制御することができるPPM方式というものもあります。エンコーダーという装置を使えば、PWM をPPM に変換することも可能です。
S.BUS(バス) は、受信機とフライトコントローラー間の信号をデジタル信号によって行います。デジタル式なのでアナログのように外乱を受けにくくなっています。
また1本のケーブルで最大18 チャネルまでの信号制御が可能です。(製品によって違いはありますが、規格としては最大18 チャネルまで)
更に、テレメトリー機能も利用できるのが特徴です。
テレメトリーはフライトコントローラーへ搭載された各種センサーからの情報を受信機経由で送信機に伝え飛行状態やアラートなどをモニターできます。(S.BUS2 規格)
受信機は送信機との通信規格に合わせて選択することと、メンテナンス性を考え同じメーカーのものを選ぶ方が無難かもしれません。
この部分の規格をよく確認して整合性(互換性)のとれたもの同士を使い、規格が合致してさえいれば敢えてメーカーをそろえる必要はありません。
3.モーター
ここは、ブラシレスモーター一択でしょう。

ブラシレスモーターは、整流子の代わりを電子回路が行うことで、整流子とブラシを無くしています。DC(直流)モーターは、ステータの巻き線回路の磁力によって永久磁石のロータシャフトを回転させます。電流の切り替えは、センサと半導体スイッチが行います。
(ブラシレスモーターの特徴)
1. 長寿命
ブラシレスモーターは整流子とブラシが無く、摺動部がないため、寿命が長い特性があります。ブラシモーターに比べ10倍以上の寿命があり、メンテナンスも容易になります。
2. モーター特性
DCモーターの特性を有し、電流とトルク、及び電圧と回転速度が比例し、低速でも高いトルクが得られます。効率が他のモーターに比べ最も優れており、小型で低騒音もあって用途が広くなっています。また、高速回転も容易で、発生ノイズも少ないと言えます。
3. 制御性
小型軽量の特性があり、慣性モーメントが比較的小さいので、変化に対して追随性に優れています。負荷が変化しても、低速から高速まで安定した速度で運転が可能です。
マルチコプターの種類の応じて、様々な規格のものが発売されています。
「適正電圧」は、このモーターの性能を発揮するのに最も適した電圧のことを指し、「使用電圧範囲」とは、このモーターを使うことができる電圧の範囲を指します。この範囲より高い電圧で使うと発熱したり寿命が短くなったりすることもあり、またあまりにも低すぎる電圧では、性能を十分に発揮することができません。
ドローンの機体サイズをもとに、モーターのKV値を検討します。KV値とは1ボルトの電圧で1分間に何回転するのかという値です。単位は 「KV=rpm/V」(rpmは1分間の回転数)。フレームサイズが130ミリ程度の機体であれば、4000~6000KVのモーターが適しているでしょう。フレームサイズが230ミリ以上のクラスであれば、2000~2500KVを選ぶ場合が多いと思います。
ここで、アレ? と思われる方もいると思いますが、回転数が低いものはその分だけ回転トルクが強いため、サイズが大きくピッチの大きなプロペラを回せると云うことです。
重量のある機体ほど、トルクの強いモーターが必要なのです。
KV値が小さければ回転数は低くなるがトルクは強くなる。
KV値が大きければ回転数は高くなるがトルクは弱くなるのです。
つまり、
小さく軽い機体は高回転型のモーターを選び、大きく重い機体はトルク重視の低回転型モーターを選択するのがよろしいかと・・。
モーターのサイズは4桁の数値で表され、コイルの直径と高さを示しています。
- モーターサイズ
- 前の2桁がコイルの直径
- 後の2桁がコイルの高さ
- 例えば、 2015 ならば コイルの直径は20mm、コイルの高さは15mm
ESCとの組み合わせに注意。ほとんどのモーターには奨励「ESC」が示してあります。
ネットショップなどで、いろいろなモーターが発売されています。
(モーターとプロペラサイズ)
プロペラが大きいほど揚力が強く、長距離飛行や高高度飛行も可能になりますが大型のものはそのぶん騒音なども大きく電源負荷も大きくなります。
最近は小型化されており、プロペラが小さなドローンもどんどん高度になってきてはいますが、ESCとモーター、プロペラのピッチと合わせて適度な組み合わせを考える必要があります。
ご自身が制作したい機体の大きさと、既製品のドローンを比較しながらそのモーターサイズを参考に選びましょう。
4.ESC
ESCは「エレクトリック・スピード・コントローラー」の略で、モーターとバッテリーの間に接続されモーターやサーボへ伝える電流をコントロールする装置でモーターの速度制御をするものです。

フライトコントローラーからは、操縦者のスティックの動きや各センサーからの信号により4個のモーターをどれだけ回転させたらよいかを指示するためのパルス信号が送られてきます。
このパルス信号に応じて、バッテリーからの電流をどれだけモーターに流す必要があるかを制御するための素子です。(電流だけでなく電圧も変化させています。)
( 内部構造 )
①パワーアンプ
②制御機構(ESC=Electronic Speed Controller)
③バッテリーの電圧を5Vに変換する電源回路、レギュレータ(BEC回路)、中にはBECの無いものもありますので注意が必要です。
となっており、人によっては「アンプ」や「スピコン」と呼ぶこともあります。どれも間違いではないと思います。。
受信機と「ESC」の間は周波数50HzのPWM信号をやり取りします。
アンプからモーターへの電力供給もPWMです。こちらの周波数は8,000Hzなどが使われています。
ESCの規格
モデル:ZTW Beatles 40A SBEC を例にとってみます。
1. ESCサイズ:52×27×11mm(L×W×H)
2. バッテリー:2-4S Lipo / 5-12NC
3. BEC出力:3A / 5V
4. 電流連続:40A
5. バースト電流: 50A
6. 重量:36g
(特徴)
ESCの熱を下げるアルミ製ヒートシンク、 セーフティーマージン( 誤ってスロットルスティックに触れてもすぐにはスタートしない安全設計)最スロー位置から5%。
ZTW Beatlesズシリーズのプログラミングカードと送信機によってプログラミングが可能。
(工場出荷時の設定)
1. ブレーキ: オフ(Off) (ON-OFF切替)
2. バッテリータイプ: リチウムポリマーバッテリー(Lipo)
3. 低電圧保護値: 3V(60%)
4. タイミング: 自動(Auto)
5. スタートモード: ソフト(Soft)
6. モーター回転: 前進(Forward) 接続時に回転方向を決める。
7. 低電圧保護モード: パワーを下げる (Reduce Power)
8. モータースタート強度: 30%
などなど、詳細が書かれています。
ESCごとに使用するバッテリーや使えるモーターの大きさが違うので確認すること。ESCは通常「最大電流」で選定しますが,最大回転数不足や電源回路の電力不足,ブレーキ設定ができない、BECが無いなど見落としが無いよう、モーターのカタログデータを確認しながら余裕をもって選択する必要があります。(BECを内蔵していない外付けタイプもあります。)
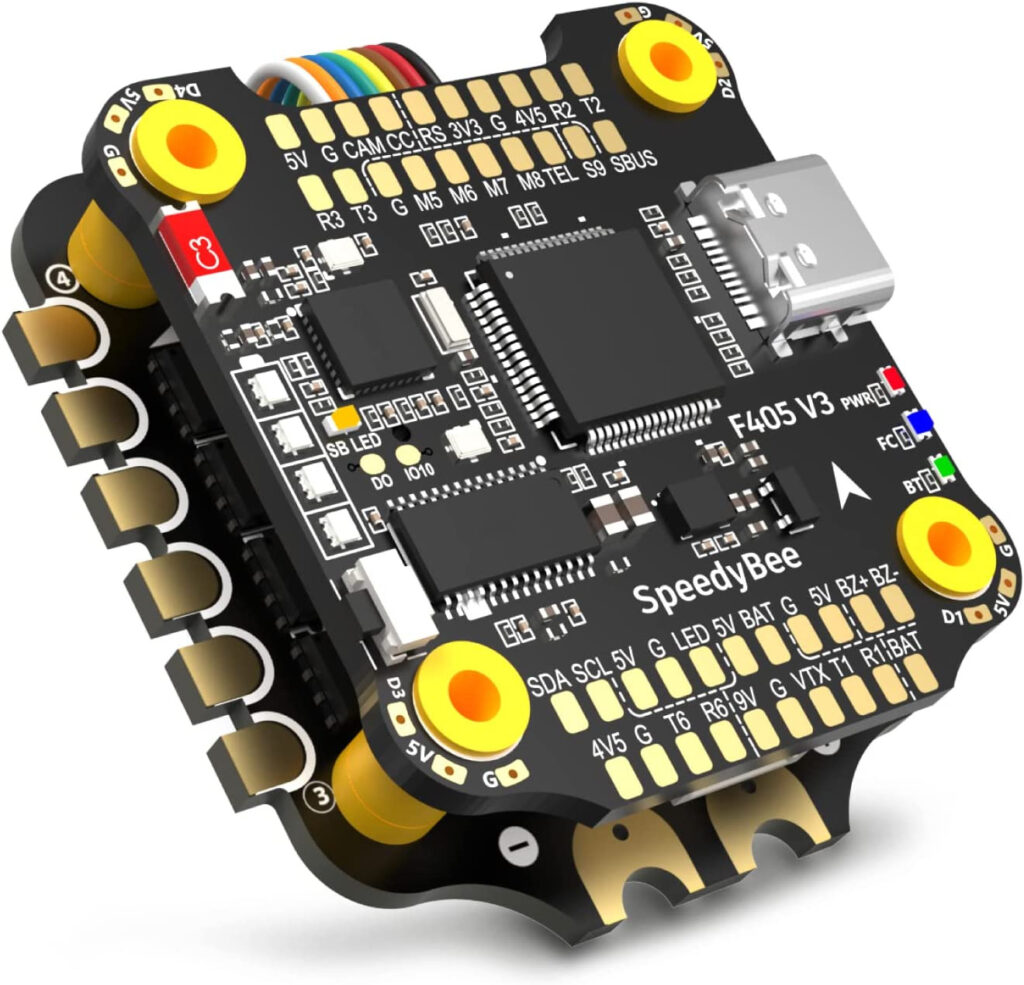
5.フライトコントローラー
フライトコントローラーは機体の姿勢や速度などを制御するための装置で、操作者が動かすスティックの動作信号をESCに伝えます。
ドローンには、機体の姿勢を制御したり、自律飛行をしたりするためにセンサーが取り付けられています。
(主なセンサー)
- 1.加速度センサー:物体の速度の変化量により、傾きや動きなどが分かります。
- 2.角速度センサー(ジャイロセンサー):物体の回転角度の変化量により、傾きや向きの変化が分かります。
- 3.地磁気センサー(電子コンパス):磁力により、方角が分かります。
- 4.気圧センサー:空気の圧力により、高度が分かります。
- 5.GNSSアンテナ:人工衛星からの電波により、位置を特定できます。
加速度センサーと角速度センサー(ジャイロセンサー)を組み合わせた慣性計測装置(IMU)といい、IMUはは機体の姿勢制御を行います。
ドローンが外部の情報を取得するために必要なセンサー類を指し、GPSモジュール、ジャイロセンサーや、加速度センサー、気圧センサーなどで構成されています。
フライトコントローラーは,主にマイコン(マイクロコンピュータ)とIMUが搭載されているのが特徴です。(マイコンは、パソコンと同じように、CPUやメモリ、入出力用のポートなどで構成されています。)
フライトコントローラーでは、これらセンサー類からの情報を元に、マイコン内部で演算処理を行い、送信機から送られてくる信号を元に、機体を適切な状態に制御してくれています。
そのため、フライトコントローラーは、ドローンの「頭脳」とも言える最重要パーツなのです。
フライトコントローラーの種類
フライトコントローラーは、様々なメーカーから発売されています。
予算との兼ね合いもありますが、出来るだけハイスペックなものを選びたいですね。目安として100グラム未満の小さな機体を作るのであればF3・F4クラス、レース用ドローンならF4もしくは高性能なF7クラスといったところでしょうか。
空撮用ドローンならGPSや気圧センサー、コンパスが必要ですが、これらのセンサーはF7には搭載されています。
フライトコントローラーの選び方
フライトコントローラーを選ぶ際には、フライトコントローラーを搭載するドローンの利用目的をまずしっかりと確認する必要があります。外部機器をいくつ取り付けるのかチェックし、どのフライトコントローラーがよいかを選択します。
ドローンレースなどでFPVフライトがメインであれば、センサーはジャイロ、加速度計など、必要最低限を搭載した小型タイプがいいですし、GPSが必要であれば、GPSとコンパスの構成を考える必要があります。
「UART」が何系統あるかは確認必須です。
UARTとはフライトコントローラーに内臓されていない機器、例えば受信機やVTXなどを外付けする際に必要となる入力端子数です。
UARTはF3・F4・F7毎に系統数が決まっているので、外部機器をいくつ取り付けるのかを決めてから選定します。
(クロック周波とUART数は以下の通りです。)クロック周波とは、駆動周波数のことで高いほど高速処理となります。
F3: 72MHz 3系統
F4:168MHz 3系統
F7:216MHz 8系統
また、マイコンにも、F3やF4・F7など、性能差で種類があります。
この「F」の値が大きくなるほど、性能がよくなりますので、予算が許すのであれば、F3よりF4更にF7を選んだ方がよいでしょう。
その他、産業用途や開発用などになると、LinuxOSに対応するオープンソース系フライトコントローラーや、DJIのN3やA3などの産業用モデルがあります。
ジャイロセンサーの働き
ジャイロセンサーはドローンの姿勢制御を行うためのもので、ドローンが飛行しているときリアルタイムで機体の傾きを検知しフライトコントローラーへそれらの情報を渡す役割を担っています。
ジャイロセンサーの処理能力
ジャイロセンサーの処理能力は4kHz、8kHz などと表示されます。(動作周波数)
この数値が大きくなるほどセンサーが姿勢検知の頻度が高くなり、ジャイロセンサーの処理速度が高まります。
例えば4kHzの処理能力のあるジャイロセンサーなら、250μs(マイクロ秒)毎に機体の姿勢検知を繰り返します。
これが8kHzであれば125μs毎となり、16 kHz ならば62.5μsとなり、細やかな姿勢制御が行われます。(フライトコントローラーの設定項目の中に、ジャイロセンサーの種別や駆動周波数の設定項目があります。)
フライトコントローラーと受信機との整合性
S.BUSなど、受信機とフライトコントローラー間の通信方式も忘れず確認します、この規格が合わないと、受信機ーフライトコントローラー間の通信が成立せず操作信号が伝達されません。
OSD(On Screen Display)
フライトコントローラーにOSD機能が付いているかも確認しましょう。
OSDは飛行時間やバッテリー残量、各種センサーからの情報などをFPVモニターに映し出す機能で、カメラからの映像と共にモニターへ表示されます。(OSDは、FPV飛行には必要なので、内臓タイプのフライトコントローラーを選ぶことをお勧めします。)
もし、OSDを後付けする場合、フライトコントローラーとは別のファームウエアで設定しなければならず、余計な手間がかかってしまします。また、搭載する基盤が増え設置スペースや機体重量の増加となってしまいます。
- OSD 機能の有無をチェックする。
- OSD は飛行時間やバッテリー残量、各種センサーからの情報などをFPVモニタへ映し出す機能
お忘れなく!
BEC(電源・レギュレーター回路)の有無も確認しましょう
一般的にフライトコントローラーへは5ボルトの電力が供給されます。バッテリーからの電力はESC経由でフライトコントローラーに供給されますが、バッテリーの高電圧が流れてしまうとフライトコントローラーが壊れてしまいます。バッテリーからの電圧は11.1ボルトや14.8ボルト程度となりますが、5ボルト以上の大きな電圧がかかってしまいうとフライトコントローラーが壊れ、場合によっては発火してしまいます。そうならないようにBECはバッテリーからの電圧を5ボルトに降圧させ、フライトコントローラーへ電流を流します。
フライトコントローラーを選択する際には、BECがあるかどうかを確認しましょう。ただし、フライトコントローラーにBEC機能がなくても、ESC側にBECが付いていれば問題ありません。
- フライトコントローラーは5ボルトの電圧で動作する。
- BECはバッテリーからの電圧を5ボルトに降圧・安定させフライトコントローラーを駆動させる。
- ただし、ESC側に無くともフライトコントローラーについていればOK。
LCフィルター(ノイズ低減フィルター)
LCフィルターが内蔵されていると電磁的なノイズがカットされるため、きれいなFPV映像を送信することが出来ます。
特にレーシングタイプのドローンはモーターを高速で回転させたり、回転の切り替えが頻繁に発生することでノイズが発生します。これを低減させるのがLCフィルターです。
- モーターの高速回転や回転数の切替えが頻繁に発生する程、FPV映像にノイズが乗りやすくなる
- LCフィルターが内蔵されていると電磁的なノイズがカットされる
DSHOT(通信プロトコル)
DSHOTはESCのプロトコルですが、フライトコントローラー側もDSHOTに対応していなければ適切な動作をしてくれません。DSHOT対応の可否はフライトコントローラーの仕様に記載されています。
購入後に確認する方法ですが、フライトコントローラーをPC(パソコン)に接続し「BetaFlight」を起動させ、コマンドラインにて「Get PWM」と入力しエンターを押すと対応しているESCのプロトコルが表示されます。DSHOTと表示されればOK、対応の可否が確認できます。
(BetaFlightについては関連書籍が出版されているので、お手元に置いておくと何かと便利です。)
- DSHOTはESC のプロトコル
- フライトコントローラーがDSHOTに対応していれば、DSHOTタイプのESCと接続可能
6.バッテリー
ドローンに使われる電池は、充電と放電が可能な二次電池で、次の電池が使われます。
- リチウムイオン電池
- リチウムポリマー電池
エネルギー密度が高く電池を小型化・軽量化できること、メモリー効果がなく完全放電しなくても充電容量が減らない点も共通しています。
しかし、リチウムイオン電池とリチウムポリマー電池は、構造上に大きな違いがあり、それにより特徴が変わります。
リチウムイオン電池
二次電池の構造は、正極と負極そして電解質からなっています。リチウムイオン電池はこの電解質が「電解液」です。
また、製造工程を自動化できるので、コストを抑えられます。
リチウムイオン電池の安全性
リチウムイオン電池の発熱や発火事故について、時々、ニュース報道があります。これは電解質が電解液であることに起因するものが少なくありません。
リチウムイオン電池が異常発熱する原因は大きく、「過充電」「外部短絡」「内部短絡」の3つに分類可能です。このうち、リチウムイオン電池の構造の影響をうける要因は「内部短絡」に分類されます。
内部短絡は「外部からの衝撃」「劣化」「使用環境(温度)」「過放電」など、さまざまな要因により発生します。
リチウムポリマー電池
リチウムポリマー電池の電解質には、電解液ではなく、ゲル状の高分子ポリマー材料を使用しています。そのため、円筒形やシート状など希望の形状に加工しやすいのです。
リチウムポリマー電池の安全性
リチウムイオン電池と異なる点は、電解質がゲル状であるため揮発しにくく燃えにくい点があり、またシート状に加工すれば、放熱面積を大きくできますので、熱の上昇を抑えられます。
さらに短絡をしたとしてもガスが発生するだけで、内部のセルを包装するアルミシールが膨らむだけで抑えられます。(電池としての機能は終わる)
ドローン用の電池の発火や爆発を防ぐための注意。
- 電池や充電器は正規品を使い、正しく充電しましょう。
- 過充電にならないように注意しましょう。(専用充電器には過充電を防止する安全装置が組み込まれています。)
- 車内など高温になる場所に電池を放置しないようにしましょう。(高温に弱い)
- 電池の膨張に気がついたら使用しない。
- 電池に衝撃を与えない。
保管には注意をし、専用充電器を使用しましょう。
7.ボディー
自作用組み立てキットから半完成品まで、多種多様の機体(機体パーツ)が販売されているので見ているだけでも楽しいものです。(因みに、私の場合組み立てキットの中古品を購入し、整合性のある各パーツを後から購入しました。)


ドローンレースを目指す方なら、自立飛行はせずあくまでも手動操作で飛ばす・・となると、ハードルは低くなってきます。
ご自身で、やれるだけのことをやってそれに合った飛行カテゴリーを選択するのもよいかと思います。
何はともあれ、とりあえずチャレンジです。
まとめ
前編は、主に基礎知識の部分をご紹介しました。
結構面倒ではありますが、楽しみながら少しづつ自分のオリジナルドローンが出来上がってくるのはやはり嬉しいものです。
後編は、カメラやVTX、その他の機能についてお話してみたいと思います。
ドローンの自作って可能なの? ドローンとラジコンの違い。(後編:装備・機能と技適取得)
Hello!ひまわり工房(便利舎ひまわり工房)
:カテゴリー( ホツマツタヱとあわのうた、正統竹内文書、カタカムナウタヒ )
:カテゴリー( ドローン入門、無線技士資格、航空法・電波法解説 )
:カテゴリー( 山林開拓とヤマでキャンプ、生きると云ふこと )
YouTube/ひまわりGチャンネル (山開拓動画を投稿しています。)




